"로봇에는 '챗GPT' 없다"…허스트의 경고
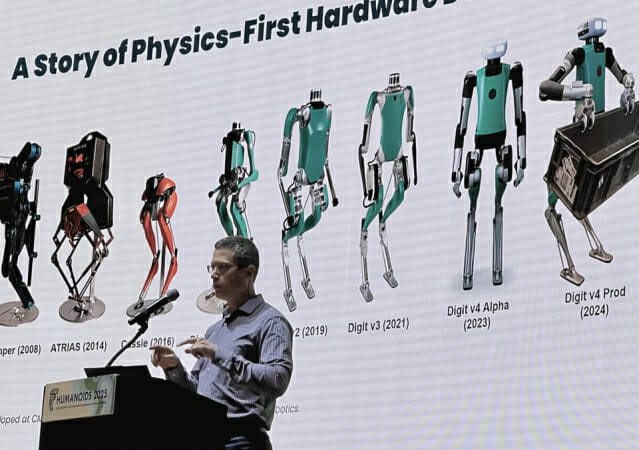
"휴머노이드 로봇이 우리 일상에 들어오기 위해선 먼저 유용한 첫 번째 작업을 맡겨야 합니다. 그 과정을 통해 모든 교훈을 배우고 예상치 못한 문제들을 해결해 나가야 합니다." 조나단 허스트 애질리티로보틱스 공동창업자 겸 최고로봇책임자(CRO)는 1일 서울 코엑스에서 열린 '국제 학술대회 휴머노이드 2025' 기조강연에서 이같이 강조했다. 애질리티로보틱스는 현재 글로벌 물류기업과 협업해 유료 계약 기반 상용 운용을 진행 중이다. 그는 "창고와 같은 물류 현장이야말로 휴머노이드가 세상에 처음 뿌리내릴 수 있는 비치헤드(beachhead) 시장"이라고 못박았다. 허스트는 휴머노이드의 첫 상업적 유스케이스로 물류창고를 꼽았다. 실제로 애질리티로보틱스의 휴머노이드 '디짓(Digit)'은 이미 미국 물류 업체 GXO 현장에 투입돼 상시 교대근무 형태로 운영되고 있다. 그는 "우리는 단순히 기술 시연에 머무르지 않는다. 고객사가 비용을 지불하는 실제 계약을 맺고, 로봇이 매일 제품을 옮기는 업무를 하고 있다"며 "이 과정에서 얻는 요구사항과 문제 해결 경험이 다음 단계로 나아가는 핵심 자산"이라고 설명했다. 허스트는 "향후 25년 안에 휴머노이드 로봇 시장은 자동차 시장의 두 배 규모로 성장할 것이라는 전망이 나오고 있다"며 "자동차 부품 공급망에 있던 많은 1차 협력업체들이 이제 로봇 시장에 눈을 돌리고 있다"고 소개했다. 그는 "자동차와 스마트폰이 일상에 깊숙이 들어온 것처럼, 앞으로는 사람 공간 속에서 휴머노이드가 자연스럽게 함께 존재하게 될 것"이라고 말했다. 휴머노이드의 형상에 대해 허스트는 단호했다. "우리는 사람과 똑같이 생긴 로봇을 만드는 것이 목표가 아니다. 사람처럼 '움직일 수 있는지'가 중요하다"고 했다. 그는 오리건주립대 시절 만든 로봇 아트리우스(Atreus)를 예로 들며 "이 로봇은 수학 모델 그대로 사람처럼 걷는 동작을 재현했다. 단순한 인형이나 애니메트로닉은 사람처럼 보일 뿐이지 움직임은 전혀 다르다. 반면 휴머노이드가 유용해지려면 사람처럼 역학을 구현해야 한다"고 강조했다. 휴머노이드 다리가 필요한 이유도 여기서 설명했다. "바퀴는 특정 환경에서 효율적이지만, 균형을 잃으면 가속해야만 회복할 수 있어 불안정하다. 반면 다리는 넘어지더라도 발을 디뎌 안정성을 확보할 수 있다. 동적 안정성을 확보하기 위해선 결국 두 다리가 답"이라고 말했다. 허스트는 안전 문제를 가장 큰 과제로 꼽았다. "현재 어떤 나라에도 동적 안정성을 가진 휴머노이드 로봇을 사람 옆에서 운용하기 위한 안전 규제가 존재하지 않는다"며 "지금은 모든 휴머노이드가 공장용 산업로봇처럼 물리적 펜스 안에서만 운영돼야 한다"고 설명했다. 그는 "현재 규제를 감안하면 휴머노이드를 쓸 이유가 없다. 사람과 같은 공간에서 함께 움직일 수 있도록 새로운 ISO 국제 표준을 만들어야 한다"며 "애질리티로보틱스는 보스턴 다이내믹스 등과 협력해 표준 제정 과정을 진행 중"이라고 밝혔다. 최근 대형언어모델(LLM)과 비교해 '로봇에도 곧 챗GPT 순간이 올 것'이라는 기대가 나오는 것에 대해 허스트는 신중한 입장을 보였다. 그는 "언어모델은 인터넷 규모의 데이터가 있었기에 가능했다. 하지만 로봇은 센서 입력에 따라 정확한 모터 토크 명령을 내린 사례 데이터가 사실상 존재하지 않는다"며 "인터넷에 쌓인 텍스트와는 완전히 다르다"고 전했다. 대신 그는 강화학습과 시뮬레이션, 시범 학습, 다중모달 인공지능을 각각 계층적으로 결합하는 '계층형 AI 구조'가 필요하다고 설명했다. 허스트는 "100년 전, 1000년 전에는 이런 로봇이 전혀 없었지만 앞으로 25년, 50년 뒤 그리고 1천년 뒤 인류는 늘 인간 공간에서 함께 일하는 로봇을 갖게 될 것"이라며 "이건 역사적 전환"이라고 말했다. 그는 "휴머노이드가 우리의 일을 대신한다기보다, 우리가 하고 싶지 않은 일들을 대신하면서 삶의 질을 높여줄 것"이라며 강연을 마무리했다.