'삼성 자회사' 레인보우로보틱스, 세이프틱스에 특허무효심판 청구
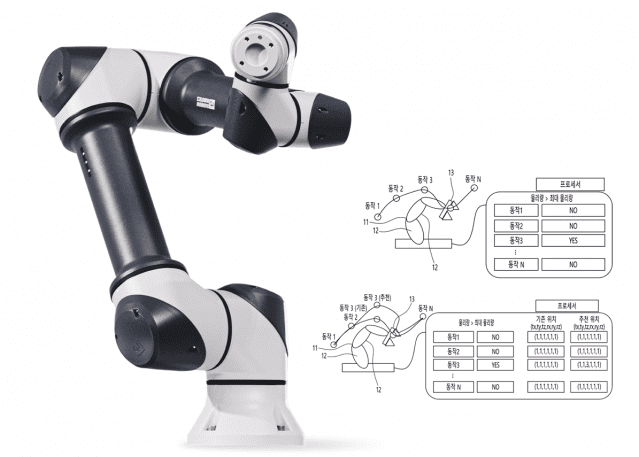
삼성전자 자회사 레인보우로보틱스가 로봇 안전성 솔루션 업체 세이프틱스의 특허 2건을 상대로 무효심판을 청구했다. 세이프틱스가 레인보우로보틱스를 상대로 특허침해를 경고하자, 대응 차원에서 무효심판을 청구했다. 쟁점 기술은 세이프틱스의 협동로봇 특허 2건이다. 발명의 명칭은 '로봇의 안정성 평가 방법'(등록번호 2732695, 2759672)이다. 로봇 움직임을 3D로 시뮬레이션하고, 충돌할 때 발생하는 충격을 계산해 안전 여부와 위험 동작 등을 분석하는 기술이다. 특허에서 언급한 유효질량과 속도, 방향, 형상 등은 협동로봇 안전규격 핵심이다. 로봇 상승과 하강, 전진, 후진 등 구분 동작(자세)별 물리량 산출 과정이 기존 발명과 얼마나 차별화되는지가 분쟁 핵심이다. 18일 대전 특허심판원에서 열린 무효심판 구술심리에서 레인보우로보틱스는 "피청구인(세이프틱스)으로부터 특허침해경고장을 받았다"며 "쟁점 특허는 기재불비(불충분하게 설명)에 해당하고, 신규성과 진보성이 없다"며 "피청구인이 지난 2월 청구한 정정심판이 인정되더라도 기재불비는 해소되지 않는다"고 주장했다. 정정심판은 주로 특허권자가 특허 권리범위(청구항)를 좁히기 위해 사용한다. 특허가 무효가 될 가능성이 있을 때 권리범위를 좁히면 특허를 유지할 수 있기 때문이다. 대신 권리범위가 좁아지면 경쟁사를 상대로 특허침해라고 주장하긴 어려워진다. 무효심판 과정에서 정정심판이 청구되는 경우는 흔하다. 세이프틱스는 레인보우로보틱스의 기재불비와 신규성 부족 등 주장을 부정하고, 진보성에 대해선 "청구인(레인보우로보틱스)이 (무효 증거로) 제시한 비교대상발명은 시간 기반 위험도만 표시한다"며 "이것을 구분 동작 단위까지 표현하려면 별도 설계가 필요하고, 이를(특허를) 단순 설계 변경이라고 볼 수 없다"고 맞섰다. 세이프틱스는 특허침해경고장 발송 외에 레인보우로보틱스를 상대로 민형사 분쟁은 아직 제기하지 않았다. 세이프틱스가 레인보우로보틱스 외에 특허침해경고장을 보낸 업체는 없다. 레인보우로보틱스는 불확실성을 없애기 위해 무효심판을 청구한 것으로 보인다. 로봇 시장은 아직 본격 개화하지 않았다. 세이프틱스의 두 특허가 등록된 시기도 각각 2024년 11월, 2025년 1월로 오래되지 않았다. 세이프틱스는 청구항을 크게 수정하지 않은 상태로 특허 유효성이 입증되면 기술 독자성을 부각할 수 있다. 경우에 따라 특허 라이선스료를 받는 것도 가능하다. 세이프틱스는 특허명세서에서 "로봇 안전성 평가는 (중략) 프로세서로 구현할 수 있다"며 "프로세서는 중앙처리장치(CPU), 그래픽처리장치(GPU), 애플리케이션 프로세서(AP) 또는 조합 형태로 (중략) D램, 플래시 메모리, 솔리드 스테이트 드라이브(SSD) 등 메모리와 함께 구비할 수 있다"고 밝혔다. 이어 "3D 모델링 로봇 종류는 (중략) 협업 로봇일 수 있고, 협업 로봇은 선단에 기계 손을 구비해 물체를 파지·이송하거나, 특정 작업 매니퓰레이터로 형성될 수 있다"고 덧붙였다. 삼성전자는 지난 2024년 12월 레인보우로보틱스 최대주주 지위를 확보하고, 미래로봇 개발을 가속하겠다고 밝혔다. 당시 삼성전자는 인공지능(AI), 소프트웨어 기술에 레인보우로보틱스 기술을 접목해 지능형 첨단 휴머노이드 개발을 앞당기겠다고 설명했다. 삼성전자는 대표이사 직속 미래로봇추진단도 만들었다. 레인보우로보틱스의 지난해 실적은 매출 341억원, 영업손실 25억원, 당기순이익 14억원 등이다. 전년비 매출은 76% 늘었고, 영업손실은 5억원 줄었다. 당기순손익은 흑자전환했다. 지난해 실적에 대해 레인보우로보틱스는 "양팔 로봇 등 주력품 매출이 늘었고, 비영업 부문 수익 감소로 당기순이익이 축소됐다"고 설명했다. 한편, 레인보우로보틱스는 삼성전자 자회사로 편입되는 과정에서 임직원들이 미공개 내부정보로 30억~40억원 규모 부당이득을 챙긴 의혹을 받고 있다. 서울남부지검 금융·증권범죄합동수사부는 18일 레인보우로보틱스 대전 본사를 압수수색한 것으로 알려졌다. 압수수색 대상에는 레인보우로보틱스 전현직 임직원 자택과 삼성전자 수원사업장 등이 포함된 것으로 전해졌다. 금융위원회 증권선물위원회는 지난달 레인보우로보틱스 대표 등 16명을 자본시장법 위반 혐의로 검찰에 고발하고 수사를 의뢰했다.