[영상] 가짜 벽 세우고 테슬라 차량 몰고 갔더니
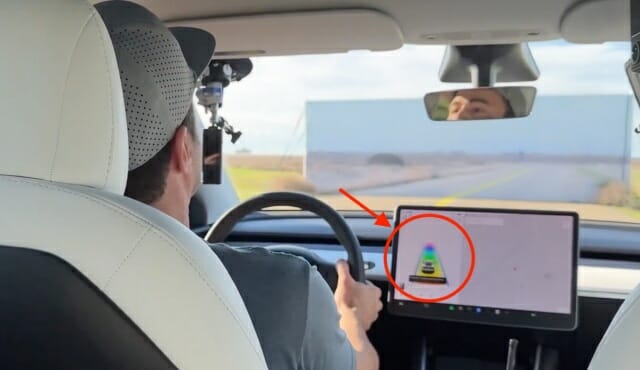
테슬라의 첨단 운전자 보조 시스템 오토파일럿(Autopilot) 시스템을 활성화한 후 테슬라 차량을 가짜 벽으로 몰고 가 충돌 여부를 실험한 영상이 공개돼 화제를 모으고 있다고 자동차 매체 일렉트렉이 16일(현지시간) 보도했다. 해당 실험은 전직 미국 항공우주국(NASA) 엔지니어였던 괴짜 유튜버 마크 로버(Mark Rober)가 진행한 것이다. 마크 로버는 최근 자신의 유튜브에 '자율주행 차를 속일 수 있을까?'(Can you Fool A Self Driving Car?)라는 제목의 영상을 공개했다. 그는 실제 주변 환경과 똑같이 보이도록 페인트로 칠한 가짜 벽을 세운 다음 오토파일럿을 활성화해 테슬라 모델Y 차량을 몰았다. 그 결과 테슬라 차량은 가짜 벽과 그대로 충돌했다. 비교를 위해 그는 라이다(LiDAR)가 장착된 렉서스 스포츠유틸리티차량(SUV)도 동일하게 테스트했는데 렉서츠 차량은 가짜 벽을 감지하고 충돌 직전 벽 앞에서 멈춰 차이를 보였다. 자율주행 기술 개발 업체들은 대부분 카메라, 레이더, 라이더(LiDAR), 초음파 등 다양한 센서를 사용해 자율주행 기술을 제공하고 있지만 유독 테슬라는 카메라 만을 사용해 자율주행 기술을 구동하고 있다. 일론 머스크 테슬라 최고경영자(CEO)는 테슬라의 카메라와 신경망 시스템이 인간 운전자처럼 작동하도록 설계되어 있어 어떤 도로에서 적응할 수 있기 때문에 경쟁사보다 빠르게 확장할 수 있다고 테슬라 차량의 장점을 어필해왔다. 마크 로버는 또한 두 차량을 가지고 다양한 실험을 진행했다. 아이 마네킹을 정지 상태, 움직이는 상태, 불빛에 눈이 부신 상태, 안개 또는 폭우 상태에서 배치한 후 차량이 이를 인식하고 멈추는 지도 테스트했다. 그 결과 테슬라 차량은 안개나 폭우 상황에서 라이다 장착 차량과 달리 마네킹을 보고 정지할 수 없었다. 레이저 기반 시스템인 라이더가 카메라 시스템보다 짙은 안개 속에서도 더 나은 감지 능력을 보인다는 것은 놀라운 일은 아니다. 테슬라의 오토파일럿과 자율주행 시스템은 수년에 걸쳐 개선 작업을 거쳤으나 아직도 라이다 기반 차량에 미치지 못하는 수준임이 나타났다고 외신들은 전했다.