박세웅 원장 "피지컬 AI에 사활…초혁신 경제 핵심 역할할 것"
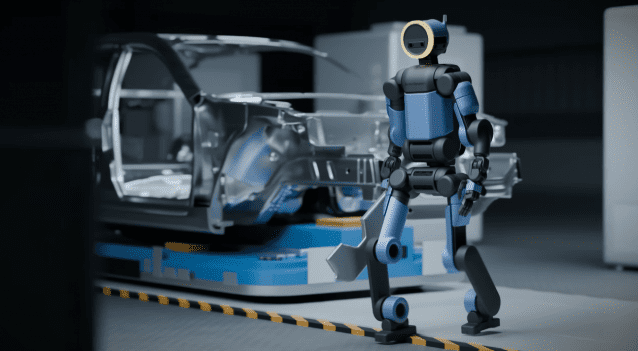
1가구 1전화 시대를 연 전전자교환기(TDX), 반도체 강국 초석을 놓은 DRAM, 지금도 세계 곳곳에서 사용중인 스마트폰 통신 방식, 부호분할다중접속(CDMA)과 함께 디지털멀티미디어방송(DMB), 휴대인터넷(WiBro), LTE/LTE-A, 5G·6G, 인공지능(AI), 홀로그램, 양자기술, 로봇, 자율주행, 스마트팩토리, 디지털 트윈 등등…대한민국을 일류 정상에 올려 놓은 ICT는 모두 한국전자통신연구원(ETRI)에서 시작됐다. 최근엔 에이전트 AI와 함께 피지컬 AI로 진화 중이다. 지난 50년을 돌아보고, 향후 나아갈 미래 50년을 조망했다.[편집자주] 한국전자통신연구원(ETRI)이 'AI 고속도로' 구축에 나섰다. 정태식 ETRI 네트워크연구본부장은 "AI시대에는 컴퓨팅 자원 뿐 아니라 이를 효율적으로 연결하는 네트워크 기술이 국가 경쟁력을 좌우하는 핵심요소"라고 언급했다. 정 본부장은 "우리나라는 1970년 경부고속도로를 개통, 생산과 유통 혁명을 가져왔듯 초고성능 컴퓨팅과 AI 반도체, 클라우드, 네트워크의 유기적 연결은 대한민국 AI 디지털 대동맥으로 기능할 것"이라고 덧붙였다. 정부가 집중 지원하는 'AI고속도로' 프로젝트는 전국 각지에 구축 중인 데이터센터를 보다 빠르고, 효율적으로 연결하는 기술 개발과 네트워크 표준화, 산업 협력을 기반으로 초고속 네트워크 생태계를 구축하는 사업이다. ETRI는 이를 뒷받침하기 위해 하이퍼 서비스 인터커넥트(HINT) 포럼도 최근 출범시켰다. AI데이터센터 네트워크와 국가통신망, 사용자와 서비스를 연결하는 액세스·메트로망, 스마트공장 ·자율주행 등을 상호 연결하는 기술을 연구하고, 국내외 표준화 활동을 추진한다. ETRI는 ▲AI 데이터센터 간 초저지연·무손실·고대역폭 패킷 광전달망 기술 ▲AI 워크로드 기반 개방형 전송 네트워크 패브릭 운영체제(OS) ▲AI 데이터센터 네트워크 생태계 구축 및 표준화 기술 등을 개발 중이다. 강태규 ETRI 패킷연구실 책임연구원(HINT포럼창립준비위원회 의장)은 "AI 데이터센터의 고성능·고효율 네트워크 인프라를 구현하고, 국가 AI 인프라 경쟁력 확보 및 관련 산업 생태계 조성에 기여할 계획"이라고 덧붙였다. 6G AI-네이티브 글로벌 주도권 확보위해 479억원 투입 AI-RAN(이동통신 무선접속망) 글로벌 선도 프로젝트도 시작했다. AI와 이동통신 인프라 융합을 통해 6G AI-네이티브 글로벌 주도권을 확보한다는 전략이다. 오는 2030년까지 479억원을 투입한다. AI-RAN은 기존 RAN에 AI를 접목한 차세대 네트워크 기술이다. 네트워크 자원 최적화와 장애 예측은 물론, AI 학습·추론 기능까지 네트워크 내부에 내재화하는 AI-네이티브 구조를 지향한다. 심진보 ETRI 기술전략연구센터 책임연구원은 "최근 글로벌 시장에서는 통신과 장비분야에서 엔비디아, 삼성전자, 에릭슨, 노키아, 소프트뱅크, 화웨이 등도 AI-RAN 기술 개발을 경쟁 중"이라고 말했다. 이를 위해 과기정통부는 ETRI를 '국가지정 AI-RAN 글로벌 선도 프로젝트 전문연구소'로 지정했다. ETRI를 중심으로 국내 내로라하는 산학연 전문가들이 대거 프로젝트에 참여한다. 산업계에서는 SK텔레콤과 KT, LG유플러스 등 국내 이동통신 3사는 물론 HFR, 유캐스트, 클레버로직 등 통신 장비·소프트웨어 기업이 참여한다. 또 학계에서는 성균관대학교, 연세대학교, 서울대학교, 아주대학교와 차세대모바일연구조합, 한국정보통신기술협회(TTA) 등이 참여키로 했다. 연구팀은 우선 기지국 소프트웨어 기반의 AI-RAN 가상 네트워크 플랫폼을 구축하고, AI 기반 무선 네트워크 기술을 학습·검증할 수 있는 통합 연구 환경을 마련할 계획이다. AI 모델 성능과 네트워크 최적화 검증을 위해 국제 이동통신 표준인 3GPP 릴리스 19 및 릴리스 21 기반 AI-RAN 소프트웨어를 개발한다. 또 다수의 안테나를 활용해 동시에 여러 사용자에게 빔을 형성하고 전송 효율을 높이는 대규모 다중입출력 기술인 E-MIMO 환경을 반영한 디지털 트윈 기반으로 AI 모델 성능과 네트워크 최적화 기술을 검증한다. 이외에 국제 공동 연구를 통해 AI 기반 기지국 에너지 절감 기술과 AI-RAN 검증 플랫폼, 디지털트윈 기반 무선 환경 기술 등을 공동 연구할 계획이다. AI-RAN 얼라이언스,3GPP(5G·6G 등 이동통신 기술 규격 표준화를 위한 글로벌 협력), O-RAN 얼라이언스(개방형 RAN 표준화국제 협의체) 활동을 통해 국제 협력과 글로벌 표준화도 확대할 계획이다. AI와 로봇, 네트워크, 컴퓨팅 융합 "차세대 AI 산업 생태계 조성할 것" AI 최종병기 '피지컬 AI' 개발도 본격화했다. 피지컬AI는 AI 로봇·스마트팩토리·자율주행 등 물리 세계와 결합, 스스로 판단하고 행동하는 차세대 AI 기술이다. 방향은 AI와 로봇, 네트워크, 컴퓨팅이 융합되는 차세대 AI 산업 생태계 조성으로 맞췄다. 이를 위해 출연연을 중심으로 산·학·연·관 협력 체계를 강화할 게획이다. 최근 글로벌 시장에선 로봇 파운데이션 모델(RFM·Robot Foundation Model)을 중심으로 로봇 지능 경쟁이 본격화했다. 미래 로봇 산업의 핵심 가치가 하드웨어를 넘어 '로봇지능'으로 이동했다. 박세웅 ETRI 원장은 지난달 개최한 '창립 50주년 기념 포럼'에서 "피지컬 AI는 AI·로봇·컴퓨팅 융합 산업의 새로운 격전지"라며 "로봇지능 연구에 집중하고 있다"고 말했다. ETRI의 피지컬AI 개발 전략은 △메타 RFM(Meta Robot Foundation Model) 기반 유연 로봇 지능 확보 △자율성장 AI 로봇 생태계 구축 △소버린 로봇 데이터 구축 및 활용 등이다. 메타 RFM은 다양한 로봇지능과 전문 AI를 통합·확장해 복합 환경에서 자율적으로 판단·협업할 수 있도록 지원하는 차세대 로봇지능 구조를 말한다. AI 로봇 지능 표준화도 추진한다. 자율주행 처럼 레벨1부터 5까지 단계를 나눠 AI 로봇의 성능과 안전성에 대한 객관적 기준을 마련하자는 것이다. 박세웅 원장은 "AI 패권 경쟁이 가속되고 있다. 정부도 출연연을 국가전략자산으로서 인식하고 정책 혁신을 펴고 있다"며 "포스트-PBS에 부합하는 새로운 50년을 준비, 민간과 협력하는 국가랩 기능과 기술주도 초혁신 경제 핵심 주체로서의 역할을 해나갈 것"이라고 강조했다.