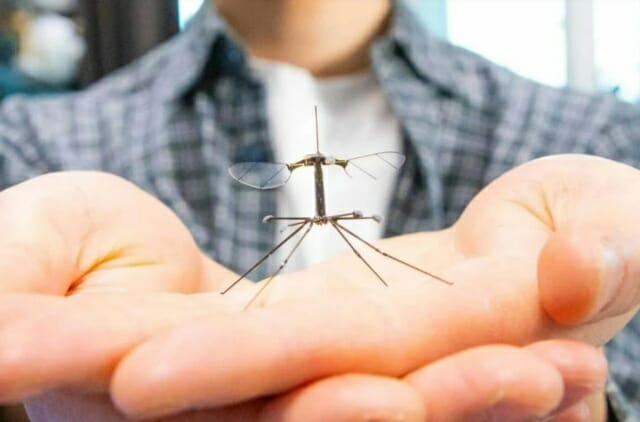
로봇 벌, 다른 곤충 긴 다리 가져와 안전 착륙 성공
작은 로봇 벌들이 들판을 날아다니며 벌의 중요 임무인 수분 임무를 수행하고 재난 지역을 조사할 날이 멀지 않았다. IT매체 기즈모도는 20일(현지시간) 하버드대학 마이크로 로보틱스연구소 연구진이 곤충 로봇 '로보비'에 긴 다리를 가진 '각다귀(Crane fly)'에서 영감을 얻은 착륙용 부속물 4개를 탑재해 안전하게 착륙할 수 있도록 개선했다고 보도했다. 해당 연구 결과는 지난 주 국제 학술지 '사이언스 로보틱스(Science Robotics)'에 발표됐다. 2013년 처음 개발된 로보비는 무게가 약 0.1g, 날개 길이가 3cm에 불과한 마이크로 로봇이다. 이 로봇은 날개를 펄럭일 때 발생하는 공기 소용돌이 때문에 지면 가까이서 기체의 불안정성을 유발하여 착륙에 어려움을 겪었다. 헬리콥터에서도 발생하는 이 문제는 '지면 효과(ground effect)'라고 불린다. "이전에는 착륙을 하려면 로봇을 지상에서 약간 떨어진 곳에 띄운 후 그냥 떨어뜨리고 로봇이 안전하게 착륙하기를 기도했다"고 하버드대학 공학·응용 과학부의 박사과정 학생이자 해당 논문의 공동 저자 크리스찬 찬이 성명을 통해 밝혔다. 로버트 우드 하버드대학 공학·응용과학 교수의 주도 하에 연구진은 대학 비교 동물학 박물관 데이터베이스에서 로보비의 새로운 착륙 디자인에 대한 영감을 얻었다. 그들은 몸에 비해 다리가 길어 지면에 착륙할 때 충격을 완화하는 곤충인 각다귀를 선택해 긴 다리 4개를 로보비에 달았다. 또한, 이 업데이트에는 로보비의 착륙 속도를 늦추기 위해 로봇의 두뇌인 컨트롤러를 개선하는 작업도 포함됐다. "로봇의 성공적인 착륙은 충돌 전 지면에 접근하는 속도를 최소화하고 충돌 후 에너지를 빠르게 분산시키는 데 달려 있다"며, "로보비의 날개가 작아도 지표면 가까이 날아갈 때 지면 효과를 무시할 수 없으며, 충돌 후 튕기고 구르면서 상황이 나빠질 수 있다"고 현낙승 미국 퍼듀대 전기컴퓨터공학과 조교수는 밝혔다. 그는 해당 연구의 공동저자로 당시 하버드대 박사후 연구원으로 활동했다. 각다귀의 긴 다리와 개선된 컨트롤러는 곤충의 근육에 해당하는 로보비의 연약한 압전 액추에이터를 보호한다. 연구진은 "마이크로 로봇용 압전 액추에이터의 주요 단점은 취약성과 낮은 파괴 인성(fracture toughness)이다"라며, "유연한 다리는 충돌 착륙 시 충돌로 인한 파손으로부터 섬세한 압전 액추에이터를 보호하는 데 도움이 된다"고 밝혔다. 실험 결과 새 착륙 장치를 부착한 로보비는 단단한 바닥 뿐 아니라 가볍고 흔들리기 쉬운 식물의 잎 위에서도 안정적으로 착륙했다. 로보비가 이번에 새로 얻은 부드럽고 안정적인 착륙 기술은 향후 환경 모니터링, 재난 감시, 인공 수분을 비롯해 섬세한 생물 조작에 곤충 로봇을 활용하는 것을 한 걸음 다가가게 한다고 기즈모도는 전했다.