"사족보행 로봇 쓸모 많아…내년 200대 양산"
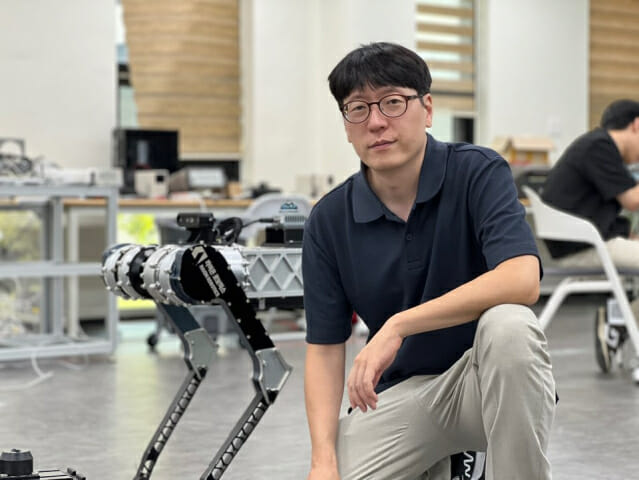
[대전=신영빈 기자] "사족보행 로봇은 야외에서 특히 효율적입니다. 순찰이나 운반 등 업무에서 확실한 기회가 존재합니다. 내년부터는 200대 규모 양산에 들어갑니다." 황보제민 라이온로보틱스 대표(카이스트 기계공학과 교수)는 사족보행 로봇의 가능성과 시장 전략을 이렇게 소개했다. 그는 마라톤 풀코스 완주로 기술력을 입증한 '라이보'를 앞세워 국방·보안·재난 대응 등 특수 환경에서 활용도를 넓히고, 해외 파트너사와 손잡아 글로벌 시장 진출을 가속화하겠다는 구상을 밝혔다. 마라톤 완주가 증명한 기술 라이온로보틱스의 사족보행 로봇 '라이보'는 올해 한 번 충전에 마라톤 풀코스(42.195km)를 완주하며 업계에 강한 인상을 남겼다. 황보 대표는 이를 두고 "부품 레벨부터 에너지 효율을 재설계하고 전체 구조와 제어 방식을 최적화한 결과"라고 설명했다. 기존 사족보행 로봇은 배터리 지속 시간이 짧아 '실제 활용성이 없다'는 평가를 많이 받았다. 그는 "배터리 주행거리를 의심받던 시절이 있었지만, 이번 성과로 에너지 효율성이 증명됐다"면서 "우리 외에는 하프 코스도 완주한 그룹이 없다"고 강조했다. 현재 라이보는 한 번 충전에 50km 이상을 주행할 수 있고, 최신 버전은 약 55km까지 가능하다. 황보 대표는 "앞으로는 100km 주행도 충분히 가능하다"고 내다봤다. 이는 로봇이 재난 현장, 군사 작전, 보안 순찰 등 장시간 임무 수행에도 투입될 수 있음을 의미한다. 그는 특히 발 부위 경량화와 모터 자체 설계를 핵심 개선점으로 꼽았다. "발은 사람으로 치면 가방에 모래주머니를 단 것과 같다"며, 말단 질량을 줄여 에너지 소모를 크게 줄였다고 했다. 또한 자체 설계한 고효율 모터를 적용해 동작당 전력 소모를 최소화했다. 황보 대표는 이 성과를 단순한 이벤트로 보지 않는다. "마라톤 완주는 글로벌 경쟁사와의 격차를 입증한 결과"라며 "앞으로도 주행 거리와 성능을 계속 늘려 사족보행 로봇의 실용성을 보여줄 것"이라고 말했다. 사족보행 vs 휴머노이드 황보 대표는 사족보행 로봇 상업화가 휴머노이드보다 앞설 것이라고 주장했다. 여기에 세 가지 근거를 들었다. 먼저 에너지 효율성과 속도에서 차이가 난다. 라이보는 42.195km를 한 번에 뛰었지만, 최근 휴머노이드가 진행한 마라톤은 하프코스를 세 번 충전해야 완주가 가능했다. 사족보행이 훨씬 먼 거리를 갈 수 있는 셈이다. 또 라이보는 현재 시속 6m 속도로 달릴 수 있는데, 휴머노이드는 빠르게 이동하기 비교적 어려운 점도 지적됐다. 야외 환경이나 험지에서는 사족보행 형태가 더욱 유리해지는 이유다. 구조적 설계와 안정성 측면에서도 비교된다. 라이보는 한 종류의 구동기 12개로 설계됐다. 덕분에 양산이 용이하고 부품 단가 절감 효과가 크다. 반면 휴머노이드는 최소 7~10종의 구동기가 필요해 생산과 유지보수 모두 복잡하다. 또한 사족은 무게중심이 낮아 넘어져도 손상이 적지만, 휴머노이드는 키가 크고 무게중심이 높아 충격에 취약한 점도 다르다. 마지막으로 적용 환경과 가반하중(로봇이 들어올릴 수 있는 무게)에서도 차이가 난다. 황보 대표는 "사족보행 로봇은 약 15kg에 달하는 짐을 싣고도 안정적으로 주행할 수 있다"며 "휴머노이드 로봇이 짐을 옮기는 사례는 아직 본 적 없다"고 꼬집었다. 실제로 군·재난 분야에서는 '걷기만 잘해도' 충분히 임무를 수행할 수 있는 경우가 많아, 팔과 손까지 필요한 휴머노이드와 달리 사족이 훨씬 현실적이라는 설명이다. 그는 "휴머노이드가 산업 현장에서 유의미한 상업화를 이루려면 20년은 남았다"면서 "사족은 이미 순찰, 감시, 군사 정찰 등에서 곧바로 투입될 수 있는 단계"라고 단언했다. 해외 파트너사 발굴 속도 라이온로보틱스는 연구실 성과를 넘어 이미 시장에서 의미 있는 매출을 내고 있다. 올해만 해도 싱가포르 국방과학연구소(DSO)에 5대(약 50만 달러)를 공급했고, 유럽에서는 전시회 시연을 계기로 판매 1대·렌트 1대 계약을 성사시켰다. 홍콩에는 2대, 국내에서는 한국군에 1대를 판매했다. 황보 대표는 "글로벌 연구기관과 군에서 먼저 찾아와 도입을 결정했다는 점이 의미 있다"고 말했다. 단순 기술 시연이 아닌 실거래 성과가 나왔다는 점에서, 라이온로보틱스의 제품력이 시장에서 검증되고 있다는 설명이다. 향후 전략은 양산 체제 확립이다. 그는 "내년부터 연간 200대 양산을 목표로 한다"며, 국내 시장은 규모가 작아 한계가 있으므로 해외 파트너사 발굴과 전시회 참가를 통해 판로를 넓히겠다고 밝혔다. 황보 대표는 글로벌 로봇 업계의 현황을 직설적으로 평가했다. 그는 "중국이 가장 앞서 있고, 미국은 스팟 이후 두드러진 진화가 없다"고 말했다. 미국 보스턴다이내믹스가 내놓은 '스팟'이 한때 혁신의 아이콘이었으나, 이후 성능·스펙에서 뚜렷한 도약은 보이지 않는다는 지적이다. 반면 중국은 유니트리 같은 기업이 공격적으로 신제품을 내놓으며 시장을 넓히고 있다. 저렴한 가격과 빠른 제품화 속도, 연구자 친화적 생태계가 강점으로 꼽힌다. 황보 대표는 "중국은 하드웨어를 하기에 좋은 환경이 조성돼 있다"며 "다양한 시제품이 빠르게 등장하면서 저변이 확장되고 있다"고 평가했다. 자율주행·관제 SW·UI/UX까지 자체 개발 솔루션 전략 사족보행 로봇이 실제 현장에 안착하려면 단순히 하드웨어만으로는 부족하다. 황보 대표는 "자율주행·관제 소프트웨어·사용자 인터페이스와 경험(UI/UX)까지 자체 개발해 '솔루션 직전' 수준까지 끌어올린 뒤 공급할 계획"이라고 밝혔다. 이 전략은 시스템 통합(SI) 업체 부담도 줄여 준다. 최소한의 현장 맞춤형 솔루션만 추가하면 된다. 황보 대표는 "플랫폼을 안정화한 뒤 솔루션 업체와의 협업으로 현장 적용 속도를 높이고 시장 확산을 가속화할 것"이라고 말했다. 라이온로보틱스는 다양한 고객군을 겨냥해 크기별 4종 라인업을 구축한다는 계획을 세웠다. 연구·교육용 소형 모델을 비롯해, 물자 운반이나 순찰·정찰에 활용 가능한 20kg급 페이로드 주력 모델, 그리고 국방 분야에서 요구하는 150~200kg급 초대형 전기 사족 로봇까지 포트폴리오를 넓힐 방침이다. 황보 대표는 특히 군용 수요를 강조했다. "75kg급 장비를 싣고 운용할 수 있는 전기 사족은 세계적으로 아직 없다"며 "실현된다면 세계 최초 사례가 될 것"이라고 설명했다. 현재 라이보 양산 안정화와 소형 로봇 국가과제를 우선적으로 진행하고, 대형 로봇은 중장기 목표로 개발을 검토하고 있다. "사족보행이 쓸모 증명할 것" 기술과 시장은 성과를 내고 있지만, 인재 확보는 여전히 가장 큰 과제다. 현재 라이온로보틱스 직원은 23명 규모다. 황보 대표는 "올해 목표는 50명이었지만 적합한 인재를 찾기가 어렵다"고 털어놨다. 그는 최근 스타트업 업계 전반에서 나타나는 인건비 상승을 지적했다. "비즈니스 모델이 명확하지 않은 스타트업조차 과도한 투자와 높은 연봉으로 인재를 끌어가는 상황"이라며 "정작 실질적 기술 개발이 필요한 기업은 인재 확보에 어려움을 겪는다"고 털어놨다. 황보 대표는 "사족보행 로봇이 먼저 쓸모를 증명할 것"이라는 자신감을 내비쳤다. 마라톤 완주로 기술력을 입증한 '라이보'를 기반으로, 순찰·보안·재난 대응·방산 등 특수 환경에서의 실질적 활용을 모색하고 있다. 내년부터 본격화할 200대 양산 체제와 해외 파트너십 확대는 국산 사족보행 로봇 상용화의 분수령이 될 전망이다.