"로봇 지능, 데이터 아닌 물리 법칙서 출발해야"
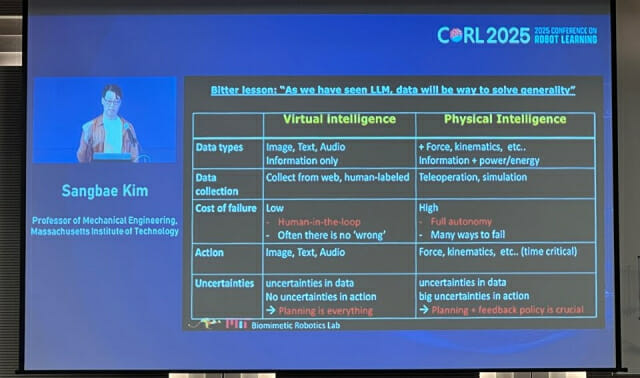
"지난 30년간 IT 기술이 우리의 삶을 크게 바꿔왔지만, 가상 서비스가 멈추는 것과 물리적 서비스가 멈추는 것은 본질적으로 다릅니다. 쓰레기 수거, 소방, 경찰이 멈춘다면 사회는 즉시 마비됩니다. 로봇이 다뤄야 할 것은 바로 이 물리적 세계입니다." 김상배 미국 매사추세츠공과대학교(MIT) 기계공학 교수는 28일 서울 코엑스에서 열린 국제로봇학습컨퍼런스(CoRL 2025) 기조강연에서 이같이 말하며, 로봇 연구가 '물리적 지능'으로 나아가야 한다고 강조했다. 김 교수는 기존 산업용 로봇이 정밀 제어와 통제된 환경에 갇혀 있다고 지적했다. 그는 "산업용 로봇은 모든 것이 예측 가능한 환경에서, 정확한 위치 제어로 작동하지만, 모바일 로봇이나 실세계 응용으로 오면 그 패러다임은 통하지 않는다"며 "전혀 다른 하드웨어와 제어 원리가 필요하다"고 밝혔다. 그는 MIT에서의 10년간 연구를 돌아보며, 다리 달린 로봇이 빠른 속도로 달리고 균형을 유지하는 과정을 예로 들었다. 그는 "치타 로봇이 땅에 닿는 시간은 80밀리초에 불과하다. 그 순간을 놓치면 제어할 기회를 잃는다"며 "그래서 완전히 새로운 전기 모터 기반 액추에이터를 만들었고, 적은 센서로 더 강인한 힘 제어를 구현했다"고 설명했다. 최근 김 교수는 로봇 팔과 손을 활용한 물체 조작 연구로 범위를 넓히고 있다. 인간 손동작을 예로 들었다. 그는 "우리는 병을 잡을 때 처음엔 가볍게 쥐고, 무게를 느낀 뒤 조금 더 조여 잡는다. 이런 반사가 매 순간 일어난다"면서 "로봇도 불확실성 속에서 '완벽한 최적화'가 아니라 '충분히 좋은 해법'을 찾을 수 있는 아키텍처를 가져야 한다"고 지적했다. 김 교수는 데이터 기반 접근법의 한계를 여러 차례 강조했다. "사람이 걷는 데이터를 수십억 시간 모아도, 누군가 뒤에서 밀었을 때 회복하는 데이터는 거의 없다"며 "데이터는 성공 사례를 쌓지만, 진짜 중요한 실패와 회복은 담지 못한다"고 전했다. 자율주행을 예로 들었다. "차량 주행은 궤적이 비교적 확실하지만, 물체 조작은 매 순간 불확실성이 존재한다"면서 "단순 모방은 학습이 아니다. 물리 법칙과 반사 제어, 데이터 기반 모델이 함께 결합해야 진짜 지능에 다가갈 수 있다"고 덧붙였다. 강연을 마무리하며 김 교수는 로봇 연구가 나아가야 할 방향을 제시했다. 김 교수는 "해석 가능하고(Interpretable), 조합 가능하며(Composable), 검증 가능한(Testable) 아키텍처를 만들어야 한다"며 "이런 접근이 있어야 사회적 문제를 해결할 수 있다"고 주장했다.